Hi, I'm Anirudh Muthuswamy
Passionate AI researcher and software engineer with a strong foundation in robotics, computer vision, and distributed computing, dedicated to building innovative solutions for real-world challenges.
About
I am a Master’s student in Artificial Intelligence at Northeastern University, with a passion for solving complex, real-world problems using cutting-edge technology. My background spans robotics, computer vision, distributed computing, and artificial intelligence, with hands-on experience in both academic research and industry. I’ve worked on projects ranging from optimizing 3D registration and long-range pixel tracking workflows to building efficient path planning algorithms for robotics and developing deep learning solutions for image analysis. With expertise in Python, TensorFlow, PyTorch, Spark, and tools like OpenCV and AWS, I enjoy creating innovative solutions that blend software engineering with AI research.
- Languages: Python, Java, SQL, CUDA, C++, R, Scala
- Libraries: NumPy, Pandas, OpenCV, Pytorch, Tensorflow, Scikit-learn, VTK, XGBoost, Matplotlib, Seaborn
- Frameworks: Flask, Hadoop, Spark, Jupyter
- Tools & Technologies: Git, Docker, AWS, Hadoop, Anaconda, Postman, Firebase, JIRA
I am currently seeking full-time opportunities in AI/ML, Robotics, or Software Engineering roles. Feel free to reach out to me at anirudhmuthuswamy2000@gmail.com or connect with me on LinkedIn.
Experience
- Simulation and Training Workflow for 3D Soft Tissue Registration:
- Enhanced training codebase with optimized distributed training (utilizing in-house HPC) and asynchronous data loading techniques for improved efficiency and scalability of a 3D U-Net model while reducing training time by 85%.
- Simulated ground truth organ deformations using finite element analysis and Bio-Mechanical models for U-Net pre- training. Implemented a visualization script to interpolate output predictions in 3DSlicer.
- Reduced 3D registration error by 35%, by integrating multi-headed self and cross attention layers in vanilla 3D U-Net.
- Long-Range 3D Pixel Tracking Workflow:
- Assessed Transformer and Optical Flow-based tracking algorithms for robust key point tracking on combination of open source and proprietary data, facilitating the registration of 3D models on soft tissue organs.
- Generated 3D point clouds from stereoscopic data using RAFT-Stereo for stereo reconstruction and depth estimation, incorporating camera intrinsic parameters.
- Accelerated long range 3D pixel tracking by creating a custom data loader, reducing memory usage by 75%.
- Collaborated within an Agile framework, contributing to bi-weekly sprints and weekly standup meetings to ensure seamless team coordination and project progress.
- Developed a pipeline for Driver Distraction Detection leveraging 3 SOTA Deep CNNs and designed a Dynamic Ensemble Model with a VGG Based Autoencoder improving combined performance of the baseline models.
- Integrated evaluation pipeline with Grid and Average Weighted ensembles using the weights and biases library.
- Addressed bias through data balancing, augmentation, and hyperparameter tuning to enhance generalization.
- Performed A/B Testing to select and assess the architectures for baseline models and its parameters.
- Improved model robustness with regularization and dropout, achieving benchmark classification accuracy of 89.13%.
- Published article in IEEE Journal: Driver Distraction Detection
- Tools and Frameworks: Python, NumPy, OpenCV, Keras, Tensorflow, Scikit-learn, Weights and Biases
- Collaborated with professor to develop and refine course materials, and actively contribute to the planning and execution of lectures and programming assignments.
- Conducted weekly office hours to provide one-on-one assistance to students clarifying course concepts. Assessed student assignments and projects, providing constructive feedback.
- Assisted students with topics involving Genetic Algorithms, Hidden Markov Models and Graph based searching.
- Tools: Python, Pytorch, Numpy, Scikit-learn, Jupyter
Projects
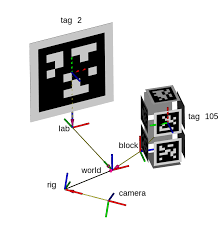
Visual Simultaneous Localization and Mapping (VSLAM) system using AprilTags
Implementation of: Loop closure detection for visual SLAM systems using convolutional neural network

Robot Navigation and Point Cloud Alignment
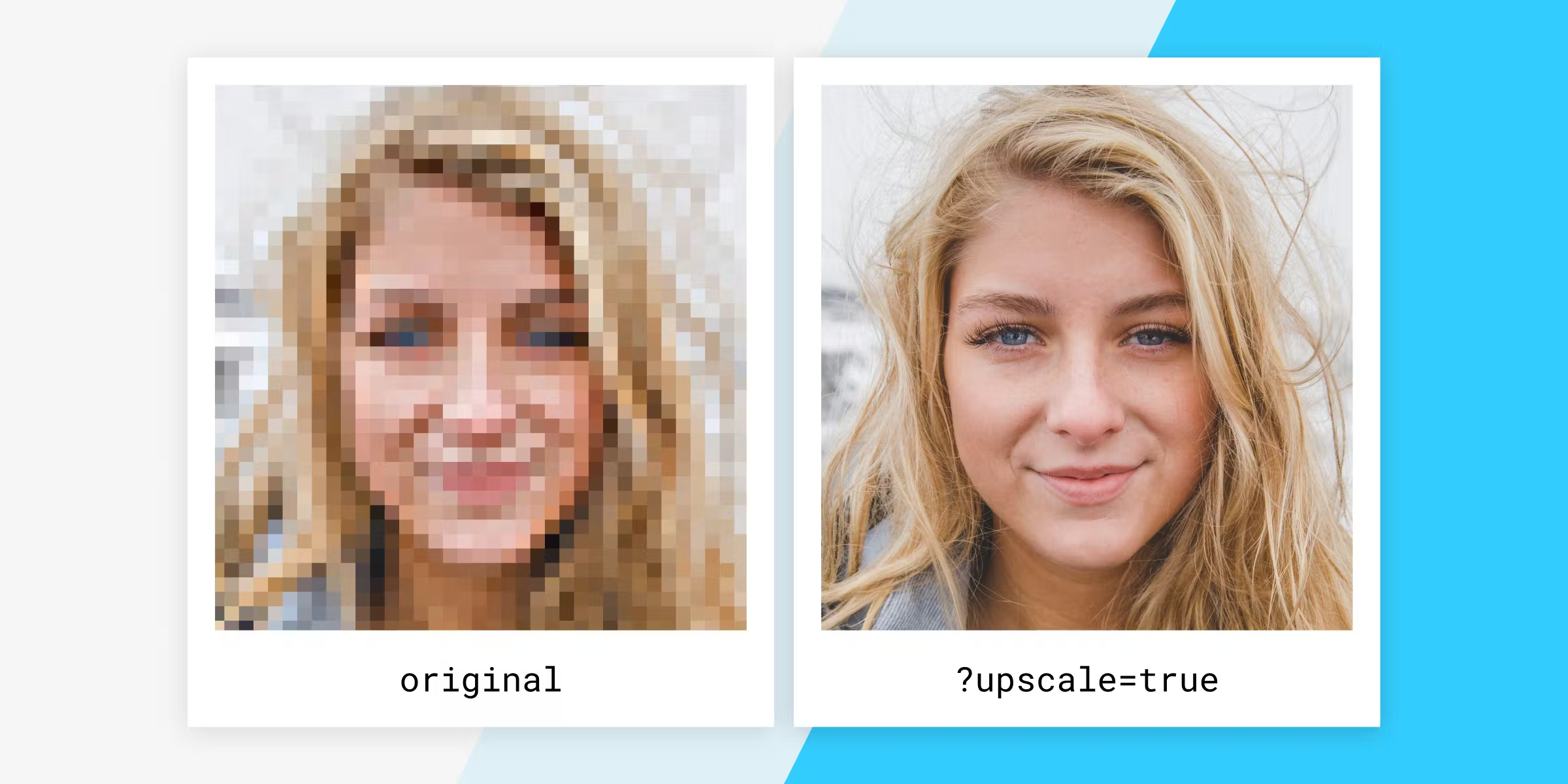
A novel color constancy approach using conditional Pix-2-Pix GANs for image-to-image translation
Flexible Image Processing Application using Java supporting multiple manipulation operations
Skills
Languages
Libraries
Frameworks
Other
 Git
Git
 AWS
AWS
Education
Boston, MA
Degree: Master of Science in Artificial Intelligence
CGPA: 3.9/4.0
- Large Scale Parallel Data Processing
- Advanced Perception
- Mobile Robotics
- Machine Learning
- Programming Design Paradigms
- Foundations of AI
- Algorithms
Relevant Courseworks:
Vellore Institute of Technology
Chennai, India
Degree: Bachelor of Technology in Electronics and Computer Engineering
CGPA: 8.79/10.0
- Signals and Systems
- Semiconductor Devices and Circuits
- Digital Logic Design
- Microcontrollers
- Linear Integrated Ciruits
- Applied Linear Algebra
- Computer Vision
- Operating Systems
- Machine Learning Algorithms
Relevant Courseworks: